Напряжение переменного тока выпрямляется и преобразуется в постоянное, а затем обратно в переменное. Частота на выходе преобразователя частоты определяется длительностью импульсов, открывающих силовые транзисторы из схемы управления.
Что такое асинхронный двигатель?
Двигатели переменного тока находят широкое применение в различных отраслях промышленности, например, в подъемном, обрабатывающем и измерительном оборудовании. Они используются для преобразования электроэнергии сети в механическую энергию для вращающегося вала. Наиболее часто используются асинхронные приводы переменного тока. В этих приводах частоты ротора и статора различны. Между этими активными компонентами имеется структурный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (типа kit, изготовленный из листового металла), выполняющий роль магнитопровода, и обмотки, расположенные в конструктивных пазах сердечника. Именно способ организации или расположения обмотки ротора является ключевым критерием для классификации этих машин.
Двигатели с короткозамкнутым ротором (SCCR)
В этом случае обмотка состоит из алюминиевых, медных или латунных стержней, которые помещаются в пазы сердечника и сцепляются с дисками (кольцами) по обе стороны. Способ соединения этих компонентов зависит от номинала двигателя: при малых значениях диски и стержни отливаются вместе; при больших значениях они изготавливаются отдельно, а затем свариваются вместе. Обмотка статора соединяется в треугольник или звезду.

Двигатели с фазированным ротором
Трехфазная обмотка ротора подключается к сети через контактные кольца на главном валу и щетки. В основе лежит конфигурация "звезда". На следующем рисунке показана типичная конструкция такого двигателя.

Принцип работы и скорость асинхронных двигателей
Рассмотрим в качестве примера АДКП, наиболее часто используемый двигатель в транспортировочном и технологическом оборудовании. Сетевое напряжение подается на обмотку статора, каждая из трех фаз которого геометрически смещена на 120°. При подаче напряжения создается магнитное поле, которое индуцирует электромагнитное поле и ток в обмотке ротора. Последний вызывает электромагнитные силы, которые заставляют ротор вращаться. Другая причина, по которой все это происходит, а именно индукция электромагнитного поля, заключается в разнице скоростей статора и ротора.
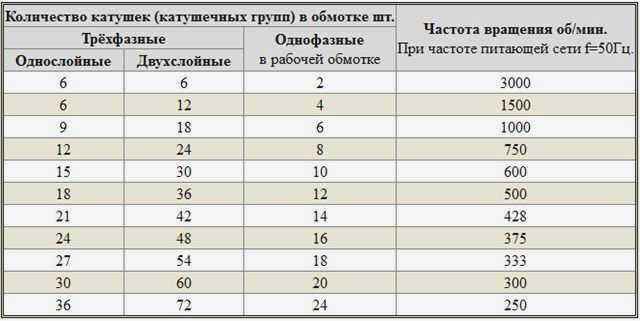
Одной из ключевых характеристик любого ADCP является скорость вращения, которая может быть рассчитана по следующей зависимости:
n = 60f / p, об/мин.
где f – частота сетевого напряжения, Гц, p – количество пар полюсов статора.
Все технические данные можно найти на металлической пластине, прикрепленной к корпусу. Однако если по каким-то причинам она отсутствует, то количество оборотов необходимо определять вручную, используя косвенные показатели. Как правило, используются три основных метода:
- Вычисление числа оборотов. Полученное значение сравнивается с действующими стандартами для 220 В и 380 В (см. таблицу ниже),
- Расчет количества витков с учетом расстояния между диаметрами обмоток. Используется следующая формула:
, где 2p – число полюсов, Z1 – число пазов в сердечнике статора, y – фактический шаг обмотки.
Стандартные значения обмоток:
- Расчет числа полюсов по сердечнику статора. Используются математические формулы, в которых учитываются геометрические параметры изделия:
Конструкция асинхронного электродвигателя
Существует 2 основных типа асинхронных машин с фазным ротором и короткозамкнутым ротором. Конструкция последней показана на рисунке:
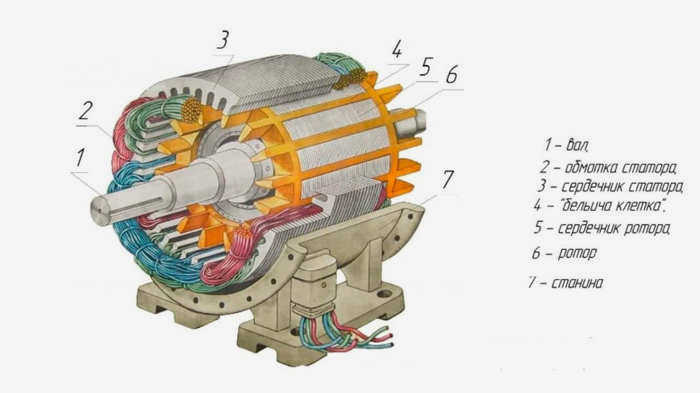
Двигатель состоит из вращающегося ротора, неподвижного статора, корпуса и рамы. Статор имеет трехфазную обмотку с угловым шагом 120°, соединенную в звезду или треугольник.
Так называемая конструкция ротора "беличья клетка" состоит из изогнутых стержней между двумя кольцами.
При подаче напряжения на обмотки статора возникает магнитное поле, которое индуцирует ток во вращающейся части; когда поля взаимодействуют, ротор начинает вращаться в том же направлении, что и магнитное поле статора. Скорость движущейся части немного меньше скорости поля, эта разница называется скольжением.
Электрические машины с фазированным ротором характеризуются конструкцией вращающейся части. Она состоит из трехфазной обмотки, соединенной в звезду и подключенной к управляющему реостату. Таким образом, ток в ней можно регулировать, изменяя скорость и крутящий момент.

Конструкция двигателя с фазным ротором сложнее, а к преимуществам таких электрических машин относятся лучшие пусковые характеристики.
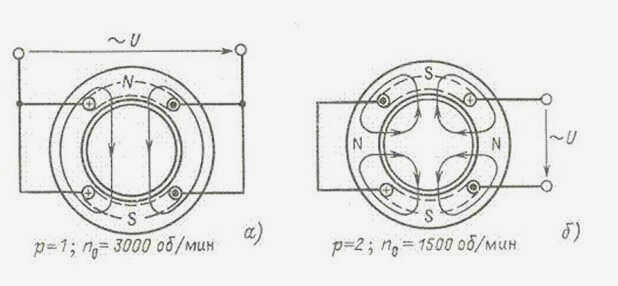
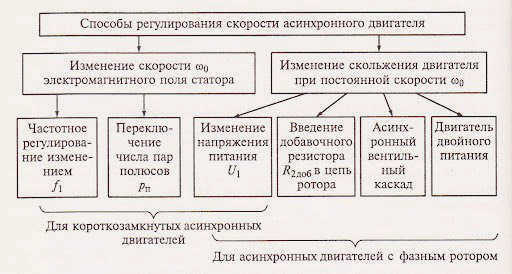
Методы регулирования скорости путем изменения числа пар полюсов и напряжения обмотки
Частота вращения вала асинхронного двигателя задается формулой: n = 60f / p, где f – частота сетевого напряжения Гц, p – число пар полюсов статора. Таким образом, подавая напряжение на различные секции обмотки, можно изменять число подключенных пар полюсов и регулировать скорость двигателя. Недостатком этого метода является то, что он более сложен. Кроме того, скорость можно регулировать только с шагом, кратным числу пар полюсов.
Другой способ изменения скорости вращения двигателя – регулирование величины напряжения питания. Он не подходит для асинхронных двигателей с короткозамкнутым ротором, так как значительно снижает жесткость механических характеристик при падении напряжения обмотки статора.
Область применения этого метода – приводы с асинхронными двигателями с фазнозамкнутым ротором. Для регулирования напряжения в цепи вращающегося кольца устанавливается реостат. Это позволяет плавно регулировать скорость вращения вала вплоть до синхронной скорости 3 000 об/мин.
Недостатком является значительная потеря напряжения в резистивном элементе, недостаточный КПД при малой нагрузке.
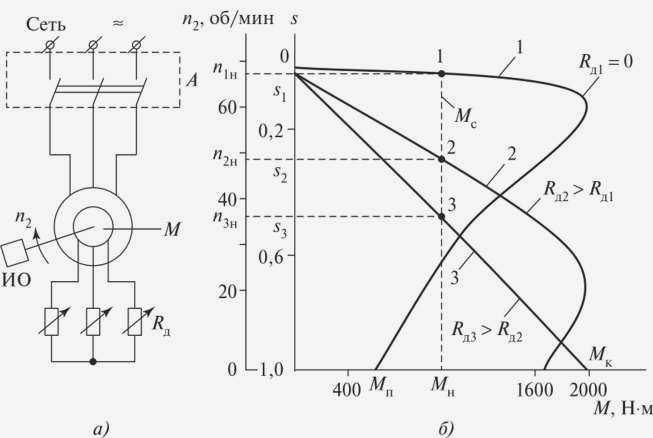
Также ухудшаются механические свойства частотного регулятора.
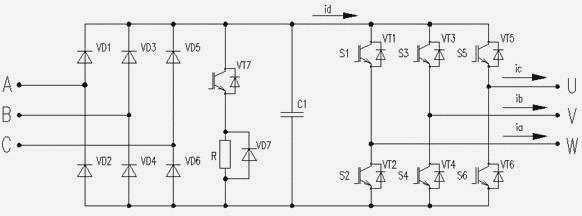
Структура частотного преобразователя
Большинство преобразователей частоты для двигателей до 690 В основаны на двухуровневом преобразователе напряжения. Они позволяют моделировать напряжение питания с желаемой формой и амплитудой частоты. Такие устройства состоят из неуправляемого выпрямителя, 2 транзисторных переключателей для каждой фазы и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры используются относительно редко.
Недостатком этой схемы является ограничение выходного напряжения, которое определяется максимальным напряжением полупроводниковых приборов.
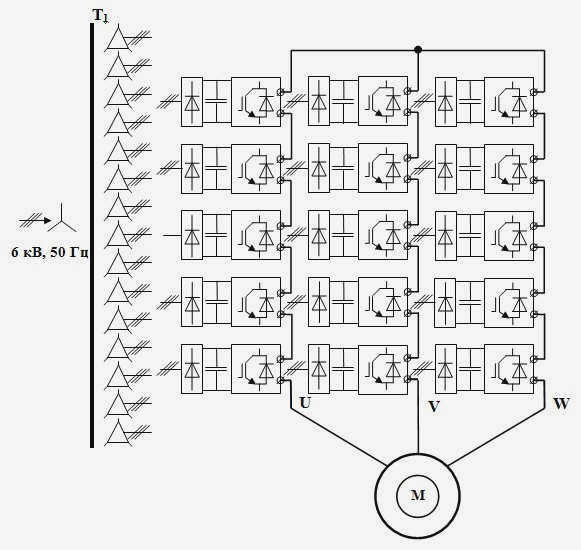
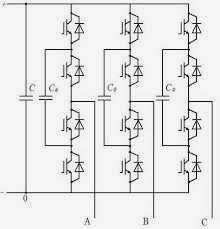
Для высоковольтных приводов используются многоуровневые схемы управления. Они состоят из нескольких однофазных инверторов, соединенных последовательно. Это позволяет избежать резонанса, обеспечивает быстрый отклик и низкую скорость нарастания напряжения. Эти преобразователи частоты отличаются своей модульностью. Если одна ячейка выходит из строя, ее можно легко заменить. Недостатком этой схемы является необходимость отдельного источника питания для каждого модуля, функцию которого выполняет трансформатор специального назначения.
Инверторы с плавающим конденсатором позволяют обойтись без входного трансформатора и увеличить количество ячеек в зависимости от требуемой мощности. Такое решение обеспечивает снижение гармоник и уменьшает скорость нарастания напряжения.
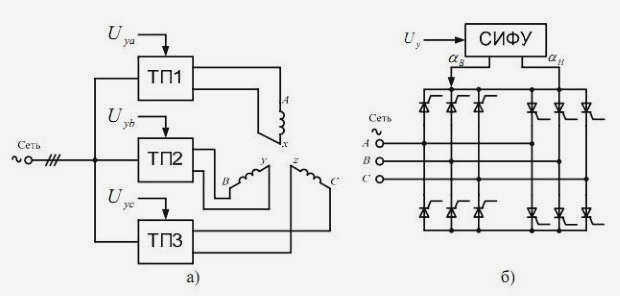
Инверторы тока используются для управления скоростью двигателей с прерывистым режимом работы и частыми реверсами. Эти устройства состоят из выпрямителя с тиристорным управлением и инвертора. В схеме имеется разделенный индукционный фильтр для снижения шума в цепи нагрузки. Выходное напряжение таких устройств имеет форму приблизительной синусоиды. Для того чтобы сгладить ее форму, необходимо включить конденсаторы перед электродвигателем. Основным преимуществом таких преобразователей частоты является способность рекуперировать энергию обратно в сеть.
Состав преобразователей частоты
Помимо выпрямителя, ШИМ-модулятора и инвертора, в состав преобразователя частоты входят
Ввод данных и связь с компьютером, другими преобразователями частоты.
- Встроенную энергонезависимую память. Аварийные отключения, изменения настроек и другие данные записываются в это устройство.
- Контроллер, обеспечивающий реализацию алгоритмов управления, обработку данных датчиков, защитное отключение в случае ненормальных режимов работы.
- ЭМ-фильтр. Это устройство снижает реактивную высокочастотную составляющую, которая снижает качество электроэнергии и негативно влияет на работу электродвигателя.
- Вентилятор и радиатор для принудительного охлаждения и отвода тепла силовых транзисторов.
- Тормозной прерыватель и другие компоненты.
В дополнение к аппаратному обеспечению преобразователи частоты включают программное обеспечение. Контроллеры с открытой логикой позволяют вносить изменения в стандартное программное обеспечение, поставляемое производителем, и позволяют программировать преобразователь частоты независимо.
Методы управления с использованием различных устройств
Обычно используются методы, изменяющие электрические характеристики: напряжение питания или частоту напряжения питания. Схемы, используемые в инверторах, встречаются во многих различных бытовых приборах.
Их можно встретить в электронике (блоки питания ноутбуков или компьютеров), ИБП и стабилизаторах напряжения. Без них трудно обойтись, например, в сварочных аппаратах. Они могут регулироваться следующими способами
- Напряжение. Для этого необходимо откалибровать так называемое скольжение двигателя (разница в скорости вращения магнитных полей якоря и статора). Недостатком этого метода является то, что он генерирует много энергии, что приводит к нагреву обмоток двигателя, и регулировать его можно только путем снижения напряжения. Он подходит для маломощного оборудования.
Реверсивный регулятор скорости двигателя
Источник prom.ua
- Автотрансформаторный регулятор. Используется автотрансформатор – трансформатор с одной обмоткой. Плюсы метода: возможность плавной регулировки, система хорошо "держит" перегрузки. Недостатки: вес и габариты трансформатора; кроме того, регулирование напряжения имеет свои ограничения.
- Тиристоры управляют скоростью вращения двигателя. Тиристоры имеют компактные размеры и малый вес. Недостатки: побочные эффекты, такие как шум и рывки двигателя.
- Транзисторный контроллер. Электронная схема содержит транзисторы; они используются для изменения напряжения на нагрузке. Преимущества устройства – малые размеры, бюджетность, отсутствие шума при низкой скорости. Недостатки: расстояние между устройством и движком ограничено.
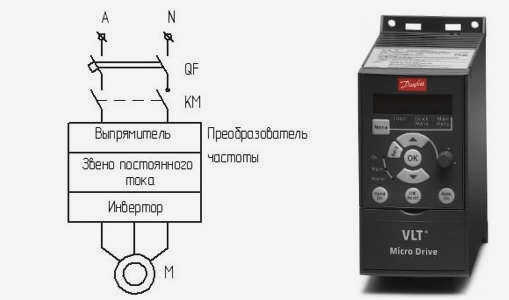
Диаграмма тиристорного регулятора
Источник asutpp.ru
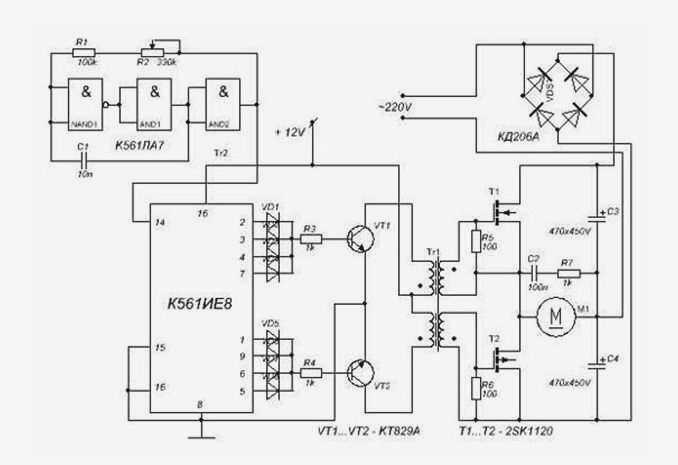
Помимо этих устройств существуют также устройства с частотным регулированием; на рынке представлены инверторы для однофазных и трехфазных двигателей. Домашние пивовары устанавливают самодельные регуляторы, позволяющие изменять напряжение питания и, соответственно, скорость вращения вала. Схемы этих устройств весьма разнообразны; часто они включают управление микроконтроллером для повышения эффективности.
Основы с первого взгляда
Для управления и регулировки скорости вращения электродвигателя используются устройства, позволяющие задавать частоту вращения и другие параметры. Вы можете купить готовое устройство или собрать его самостоятельно. В любом случае следует обратить внимание на рабочее напряжение, мощность и частоту двигателя.
Вопрос
Напишите в комментариях, как вы считаете, нужно ли рассчитывать характеристики машины, для которой вы планируете использовать регулятор?
- #регуляция
- #асинхронный двигатель
- #вращение
- #регулирование скорости
- #220 В
- Добавить в закладки
- Читать далее