Тиристорные регуляторы мощности являются одними из самых распространенных и имеют простую схему работы.
Что такое асинхронный двигатель?
Двигатели переменного тока довольно широко применяются в различных областях нашей жизни, в подъемных, обрабатывающих, измерительных устройствах. Они используются для преобразования электроэнергии сети в механическую энергию для вращающегося вала. Наиболее часто используются асинхронные приводы переменного тока. В этих приводах частоты ротора и статора различны. Между этими активными элементами имеется расчетный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), который выполняет роль магнитопровода, и обмотку, которая расположена в конструктивных пазах сердечника. Ключевым критерием для классификации этих машин является то, как организованы или расположены обмотки ротора.
Двигатели с короткозамкнутым ротором (SCCR)
В них используется обмотка, состоящая из алюминиевых, медных или латунных стержней, которые вставляются в пазы в сердечнике и сцепляются с дисками (кольцами) по обе стороны. Соединение этих компонентов зависит от номинала двигателя: при малых значениях диски и стержни отливаются вместе; при больших значениях они изготавливаются отдельно, а затем свариваются вместе. Обмотка статора соединяется в треугольник или звезду.

Двигатели с фазным ротором
Трехфазная обмотка ротора подключается к сети через контактные кольца на главном валу и щетки. За основу берется конфигурация звезды. На следующем рисунке показана типичная конструкция такого двигателя.

Принцип работы и скорость асинхронных двигателей
Мы рассмотрим этот вопрос на примере АДКП, наиболее часто используемого типа электродвигателя в погрузочно-разгрузочном и обрабатывающем оборудовании. Сетевое напряжение подается на обмотку статора, каждая из трех фаз которого геометрически смещена на 120°. При подаче напряжения создается магнитное поле, которое индуцирует электромагнитное поле и ток в обмотках ротора. Последний вызывает электромагнитные силы, которые заставляют ротор вращаться. Другая причина, по которой все это происходит, а именно индукция электромагнитного поля, обусловлена разницей в скорости вращения статора и ротора.
Одной из ключевых характеристик любого ADCP является скорость вращения, которая может быть рассчитана по следующей зависимости:
n = 60f / p, об/мин.
где f – частота сетевого напряжения, Гц, p – число пар полюсов в статоре.
Все технические данные указаны на металлической пластине, прикрепленной к корпусу. Однако если по каким-то причинам он отсутствует, количество оборотов необходимо определить вручную с помощью косвенных показателей. Как правило, используются три основных метода:
- Расчет числа оборотов. Полученное значение сравнивается с действующими стандартами для 220 В и 380 В (см. таблицу ниже),

- Расчет количества витков с учетом расстояния между диаметрами обмоток. Используется следующая формула:
, где 2p – число полюсов, Z1 – число пазов в сердечнике статора, y – фактический шаг обмотки.
Стандартные значения обмоток:
- Расчет числа полюсов по сердечнику статора. Используются математические формулы, в которых учитываются геометрические параметры изделия:
Основные задачи
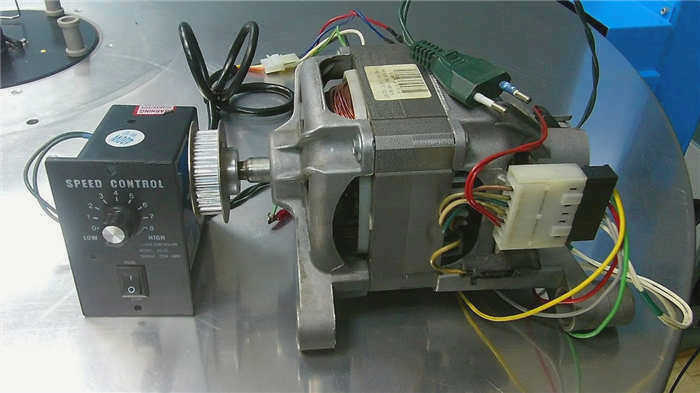
Регулятор скорости в любой электроустановке используется для установки числа оборотов в единицу времени. Скорость обычно измеряется в оборотах в минуту (об/мин). При нажатии кнопки пуска подается пусковой импульс; в этот момент регулятор скорости настраивает двигатель на плавный пуск, регулируя частоту, силу и напряжение тока. Некоторые технические процедуры требуют снижения скорости рабочих органов машины на определенную величину.
В зависимости от условий эксплуатации регулятор скорости, подключенный к двигателю, может выполнять ряд других задач:
- контроль текущего уровня температуры и давления в системе без необходимости использования устройства обратной связи для привода машины, или в случае асинхронного двигателя
- увеличение экономии электроэнергии без потери мощности. Адаптируя двигатель для плавного пуска, контроллер снижает потери эффективности при запуске и остановке ротора, при увеличении или уменьшении и при регулировании тяги. Если двигатель был выбран для работы в режиме коротких импульсов (напр. воздушный компрессор), который также достаточно мал, наличие регулятора скорости является обязательным;
- Асинхронные двигатели с высокой нагрузкой на вал используют регулятор для предотвращения чрезмерного пускового импульса. Это уменьшает вероятность ложного срабатывания защитной автоматики за счет снижения нагрузки на токовые цепи;
- для трехфазного электродвигателя необходим регулятор для стабилизации скорости на определенном значении. Это облегчает выполнение точных технологических операций, тонкая настройка которых напрямую влияет на качество конечного продукта. Отказ может произойти из-за скачков напряжения или нагрузки на вал. С предварительно установленным регулятором электродвигатель 220 В работает более стабильно;
- Если система имеет стандартную конфигурацию и электродвигатель питается напряжением 220 В, регулятор скорости часто имеет только основную функцию изменения скорости от нуля до приемлемого предела. В его функции также входит поддержание крутящего момента при медленной работе электродвигателя.
Как выбрать
Для того чтобы подобрать тип регулятора скорости, который адаптирует двигатель к конкретным условиям, необходимо изучить номинальную мощность двигателя при нормальной нагрузке. Важным нюансом являются условия эксплуатации электродвигателя, а также способ его работы и конструкция.
Контроллеры векторного типа сочетаются с коллекторными двигателями. Важно обратить внимание на выходную мощность контроллера, которая должна быть несколько выше мощности электродвигателя для обеспечения стабильной и безопасной работы электропривода. Управление векторного типа регулируется в зависимости от характера обратной связи, а также постоянных значений магнитного потока. Скалярное управление рассчитывается на основе фактической нагрузки на вал двигателя. Этот метод проще, но ему не хватает надежности.
Контроллер постоянно защищает двигатель с помощью системы контроля напряжения. Чтобы этот комплекс срабатывал в нужные моменты, выбирайте модель с широким диапазоном. Убедитесь, что количество и размер входных контактов соответствуют техническим характеристикам имеющегося типа электродвигателя. Также входное напряжение проходит через аппаратную широтно-импульсную модуляцию, которая реализуется с помощью ШИМ-контроллера.
Диапазон доступных значений выбирается в соответствии с имеющимся оборудованием. Например, для простого вентилятора будет достаточно от 500 до 1 000 оборотов в минуту. Более быстроходные устройства, такие как станки и другие производственные системы, могут вращаться со скоростью до 3000 оборотов в минуту.
Не менее важным техническим нюансом являются размеры контроллера. При конфигурировании двигателя для работы в сочетании с регулятором скорости необходимо учитывать доступное пространство для регулятора скорости. Обычно для установки регулятора скорости имеется ниша, полка или свободное пространство.
Основные типы регулирования
Простейшие методы регулирования скорости – это механические методы регулирования скорости:
- редукторы;
- муфты;
- Редукторы; муфты; коробки передач.
Эти варианты все реже встречаются в современном оборудовании, поэтому нет необходимости рассматривать их подробно. Изменение числа полюсов в обмотке также является достаточно редким методом.
Некоторые из простых и часто используемых методов следующие
- Изменение напряжения питания двигателя;
- изменение частоты питающего напряжения.
Регулирование напряжением
Регулирование скорости этим методом заключается в изменении скорости скольжения двигателя. Это разница между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и самим ротором. Формула выглядит следующим образом:
S = (n 1 – n 2 )/n 2
n 1 – скорость вращения магнитного поля;
n 2 – скорость вращения ротора.
Этот процесс генерирует уже известную энергию скольжения, которая способствует нагреву обмоток двигателя.
Этот метод отличается небольшим диапазоном возможных регулировок, примерно 2 к 1, и реализуется только в направлении "вниз" путем снижения напряжения питания. Этот метод желателен для регулирования скорости более мощных двигателей. Однако особенности метода не мешают использовать его и для маломощных двигателей с вентиляторными нагрузками. Также реализован широкий спектр схем контроллеров.
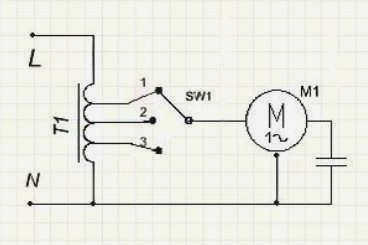
Автотрансформатор
Данный тип схемы содержит основной компонент для управления – автотрансформатор. Конструктивно он представляет собой простой трансформатор, содержащий одну обмотку и отводящую часть обмоток. Гальваническая развязка от сети отсутствует, что позволяет экономить электроэнергию, так как отсутствует вторичная обмотка.
Регулирование частоты
Эта технология появилась относительно недавно благодаря доступности модулей (особенно IGBT) и высоковольтных транзисторов. В настоящее время преобразование частоты является одним из основных способов регулирования не только мощности, но и производительности и скорости работы оборудования и приводных механизмов в системах на базе электродвигателей.
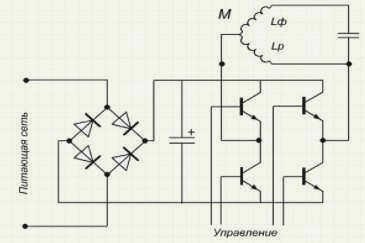
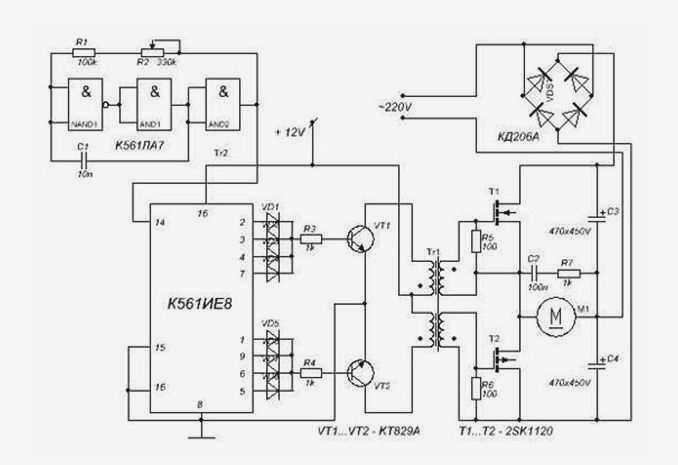
Пример схемы преобразователя частоты
Управление однофазными машинами осуществляется с помощью таких компонентов, как:
- Однофазные преобразователи частоты;
- Трехфазные преобразователи частоты без конденсатора.
Далее мы рассмотрим особенности "преобразователей частоты", которые используются для управления однофазными машинами.
Области применения преобразователей частоты
Для обеспечения стабильного запуска и продолжительной работы электродвигателя используются специальные алгоритмы, разработанные для однофазных машин. Частота также может регулироваться в сторону увеличения, хотя и в ограниченном диапазоне частот. Это происходит благодаря конденсатору, установленному в цепи фазосдвигающей обмотки. Сопротивление устройства зависит от частоты тока. С помощью формулы это выражается следующим образом:
Xc = 1/2pfC,
где f – частота тока;
C – емкость конденсатора.
Преимущества данного метода:
- Реализация интеллектуального управления двигателем;
- Стабильность, позволяющая двигателю работать непрерывно в течение длительных периодов времени;
- Расширенная функциональность современных "частотных контроллеров";
- Контроль работы двигателя для поддержания производительности на стабильном уровне. Параметры включают давление воды, поток воздуха и скорость при изменяющихся нагрузках;
- Расширенная защита как приводного устройства, так и приводимой им машины;
- Входы для аналоговых и цифровых датчиков;
- Разнообразные выходы;
- реализованный коммуникационный интерфейс для упрощения контроля и управления;
- предустановленные скорости;
- Стандартный ПИД-регулятор.
С линии
Однофазные двигатели переменного тока также позволяют регулировать скорость вращения ротора.
Коллекторные двигатели

Эти двигатели можно встретить в электродрелях, лобзиках и других инструментах. Чтобы уменьшить или увеличить скорость, достаточно изменить напряжение питания, как и в предыдущих случаях. Существуют также решения для этой цели.
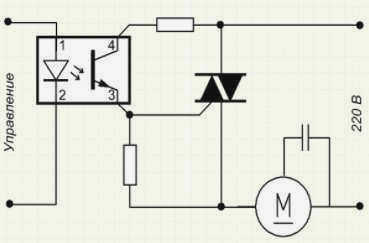
Конструкция подключается непосредственно к электросети. Управляющим элементом является симистор, управляемый диодом. Симистор размещается на радиаторе, а максимальная мощность нагрузки составляет 600 Вт.
Если имеется подходящий ЛАТП, то все это можно сделать с его помощью.
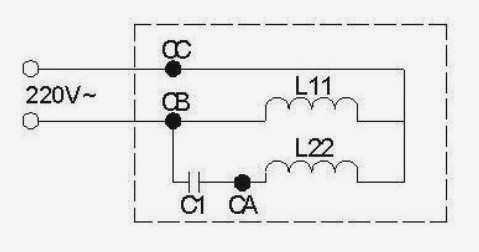
Двухфазный двигатель

Устройство, имеющее две обмотки, пусковую и рабочую, по сути, является двухфазным двигателем. В отличие от трехфазного двигателя, он имеет возможность изменять скорость вращения ротора. Характеристики вращающегося магнитного поля не круговые, а эллиптические, что обусловлено его конструкцией.
Существует два варианта управления скоростью вращения:
- Изменение амплитуды питающего напряжения (Uy),
- Фаза – изменение емкости конденсатора.
Эти устройства широко используются как в быту, так и в промышленности.
Обычные асинхронные машины
Трехфазные электрические машины, хотя и просты в эксплуатации, имеют ряд особенностей, которые необходимо учитывать. Если просто изменить напряжение питания, то крутящий момент изменится незначительно, но не более. Чтобы регулировать скорость в широком диапазоне, необходимо довольно сложное оборудование, которое трудно и дорого устанавливать и настраивать.
Выбор оборудования
Чтобы выбрать эффективный регулятор, необходимо учитывать характеристики устройства и особенности применения.
- Векторные регуляторы обычно используются для коллекторных двигателей, но скалярные регуляторы более надежны.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой мощности используемого устройства. Более того, она должна быть превышена, чтобы обеспечить безопасную работу системы.
- Напряжение должно находиться в широком допустимом диапазоне.
- Основное назначение регулятора – преобразование частоты, поэтому этот аспект должен быть выбран в соответствии с техническими требованиями.
- Другие аспекты, которые необходимо учитывать, – это срок службы, габариты и количество входов.
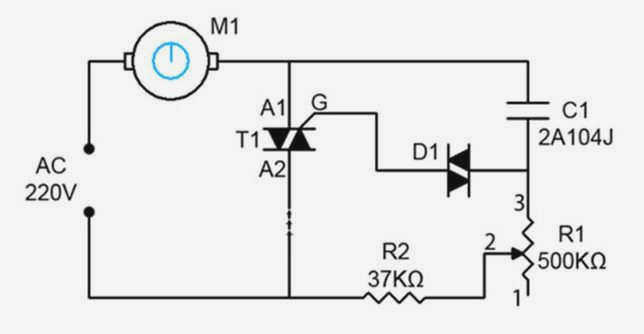
Симисторное устройство
Симисторное устройство используется для управления освещением, мощностью нагревательного элемента и скоростью вращения.

Схема симисторного регулятора содержит минимум деталей, показанных на рисунке, где C1 – конденсатор, R1 – первый резистор и R2 – второй резистор.
Преобразователь используется для регулирования мощности путем изменения времени открытия симистора. Если он закрыт, конденсатор заряжается с помощью нагрузки и резисторов. Один резистор регулирует величину тока, а другой резистор – скорость зарядки.
Когда конденсатор достигает порогового напряжения 12 В или 24 В, срабатывает выключатель. Симистор переходит в открытое состояние. Как только напряжение сети достигает нуля, симистор закрывается, и конденсатор получает отрицательный заряд.
Регулирование напряжения
Регулирование скорости с помощью этого метода основано на изменении так называемого "скольжения двигателя". проскальзывание двигателя – это разница между скоростью магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 – скорость вращения магнитного поля
n2 – скорость вращения ротора
Это приводит к высвобождению энергии скольжения, что вызывает нагрев обмоток двигателя.
Этот метод имеет небольшой диапазон регулировки примерно 2:1 и может использоваться только в сторону уменьшения, т.е. путем снижения напряжения питания.
Для этого метода регулирования скорости необходимо устанавливать более мощные двигатели.
Тем не менее, этот метод часто используется для небольших двигателей с вентиляторной нагрузкой.
На практике используются различные схемы регуляторов.
Регулирование напряжения автотрансформатором
Автотрансформатор – это обычный трансформатор, но с одной обмоткой и отводом части обмотки. Гальваническая развязка от сети отсутствует, но в данном случае она и не нужна, поэтому экономия достигается за счет отсутствия вторичной обмотки.

На схеме показан автотрансформатор T1выключатель SW1к которому подключены выходы с разными напряжениями, и двигатель М1.
Регулирование происходит ступенчато, обычно не более 5 ступеней.

Преимуществами данной схемы являются
- неискаженная форма выходного напряжения (чистая синусоида)
- хорошая устойчивость трансформатора к перегрузкам
Регулирование частоты
Еще около 10 лет назад регуляторы скорости вращения двигателя были доступны на рынке в ограниченном количестве и стоили довольно дорого. Причина заключалась в отсутствии дешевых высоковольтных силовых транзисторов и модулей.
Однако развитие полупроводниковой электроники привело к появлению на рынке силовых модулей IGBT. Как следствие, на рынке массово появились инверторные кондиционеры, сварочные инверторы и преобразователи частоты.
Сегодня преобразование частоты является основным способом регулирования мощности, производительности, скорости всего оборудования и механизмов, приводимых в движение электродвигателями.
Однако частотные преобразователи предназначены для управления трехфазными двигателями.
Однофазными двигателями можно управлять с помощью:
- Однофазными двигателями можно управлять с помощью.
- Трехфазные частотно-регулируемые приводы с деактивацией конденсатора
Преобразователи частоты для однофазных двигателей
В настоящее время только один производитель заявляет о серийном производстве специализированных преобразователей частоты для конденсаторных двигателей – INVERTEK DRIVES.
Это модель Optidrive E2.
Специальные алгоритмы обеспечивают плавный запуск и работу двигателя.
Частота также может регулироваться в сторону увеличения, но в ограниченном диапазоне частот; этому препятствует конденсатор, установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f – частота тока
C – емкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT-транзисторами: